 报价咨询:020-29838089
报价咨询:020-29838089
报价咨询:020-29838089
报价咨询:020-29838089

的转速,实现逐渐加速,减速的效果。为了能清除看到效果,笔者还专门用拙劣的手工做了一个纸风车,粘到电机转轴上。下面就来动手做实验。
的。如果盖上 jumper,则驱动板由 Arduino供电;如果拔掉jumper,则驱动板独立供电。驱动板若要独立供电,
接标注 EXT_PWR(意为 external power)的 2 个接口。注意不要接反正负极,否则会烧坏驱动板甚至 Arduino!驱动板上LED 灯亮,表示驱动板供电正常。
PWM 全称 Pulse Width Modulation,它的原理,简而言之,是通过产生持续时间长短不一的数字脉冲,来
连续变化的电平(“捏造”模拟信号)。注意芯片上的标识,pin 号旁边有 ~ 符号的表示该 pin 支持 PWM。(更详尽的原理以后再做整理)
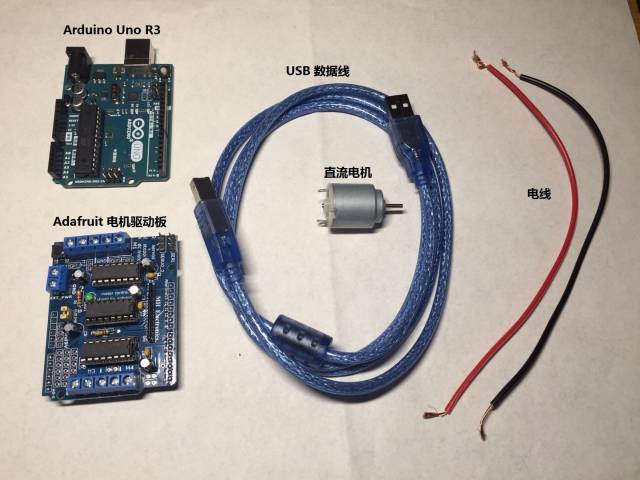
:首先将 Adafruit 电机驱动板直接堆叠插在 Arduino 板上,注意数字引脚对数字引脚,模拟引脚对模拟引脚,就可以很容易安装好。效果如图:

b. Arduino 板用 USB 数据线接 PC。这时候 Arduino 和驱动板都有供电,2 个板子上的 LED 灯常亮;
c. 2 条电线 个脚,打个小结固定一下,连接顺序现在来说随意。这里提一下电线的准备,用剪刀剪出合适大小的电线 端各去掉半个手指头长度的包皮,让导线 条电线另外一端接驱动板上标注 M3(意为 Motor 3)的 2 个脚。用 3 mm 十字螺丝刀拧松 2 个脚的螺丝,把电线 只脚的压片下,然后拧紧螺丝,效果如图:

要用代码控制 Adafruit 电机驱动板,可以使用 Adafruit 提供的库函数,轻松上手。然后打开 Arduino IDE,在菜单里,点击“项目”->